Soft Robot Gripper reported in PNAS
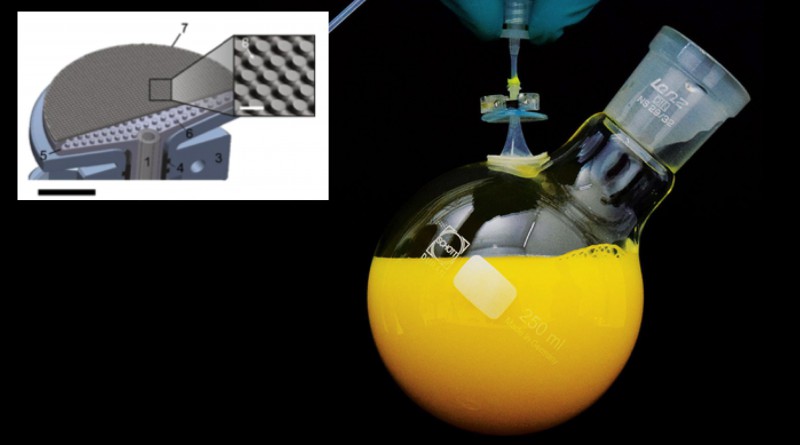
SML collaborated with the Sitti Lab at Max Planck to introduce a soft robot gripper capable of robust adhesion to a wide variety of surfaces. The gripper utilizes a bio-inspired fibrillar interface composed of microscale elastic pillars. In contrast to past work on bio-inspired adhesives, this gripping system is capable of strong and reversible adhesion to both flat and rounded surfaces.
This work was published in PNAS and is also described in an article in Science.