SML
Our primary focus is on multifunctional materials for soft robots that are safe for human interaction. Historically, robots have been engineered as heavy industrial machinery for repetitive tasks like welding, painting, and machining and are not typically designed for physical interaction with humans. As robots gradually leave the factory floor and enter our workplaces, hospitals, and homes, they must be re-engineered for safe interaction with humans. These new generation of medical and service robots will assist and cooperate with humans in a broad range of co-robotic tasks, from teleoperated minimally-invasive surgery to inventory handling and household cleaning.
As the fields of co-robotics and soft robotics continue to grow, progress will increasingly depend on new classes of materials that will replace rigid motors and electronics. The Soft Machines Lab is helping to advance these efforts by introducing new designs, theories, and methodologies that address the following emerging challenges:
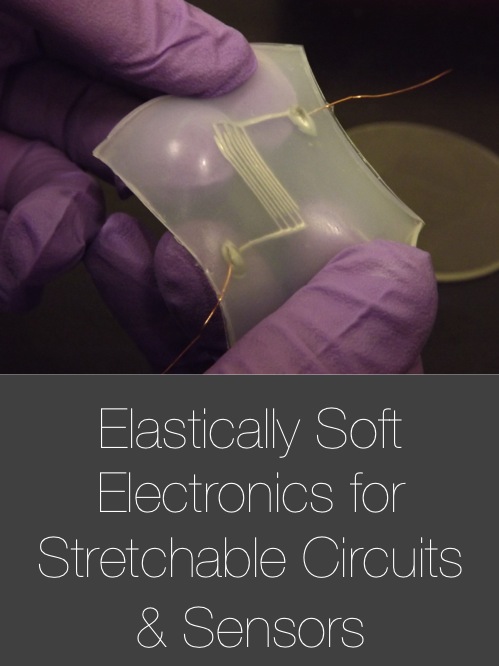
- Elastically soft sensors and circuits for sensorized “artificial skin” and biomechanically compatible stretchable electronics
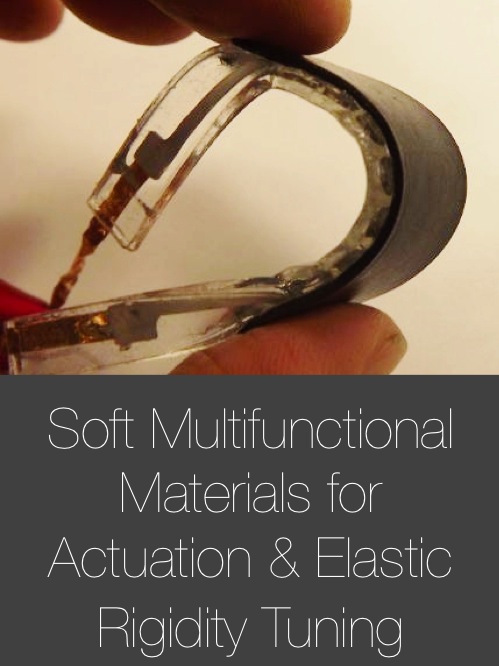
- Soft multifunctional materials for “artificial muscle” actuation, elastic rigidity tuning, and energy recovery/harvesting
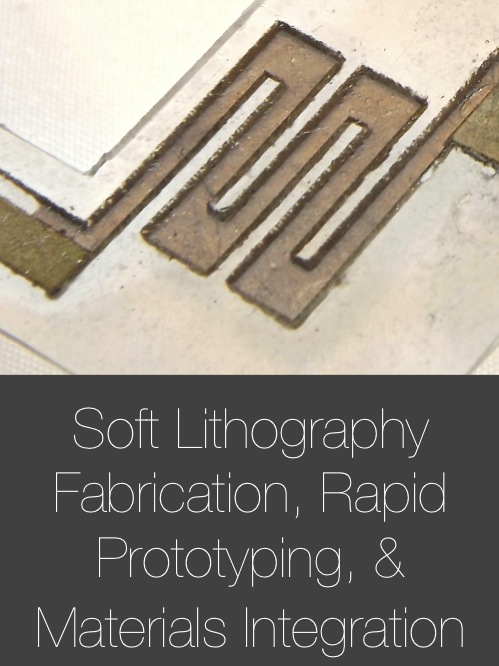
- Soft lithography fabrication techniques for rapid production of elastically soft sensors and multifunctional composites
Funding