Progress in wearable computing, bioelectronics, and physical human-machine interaction depends on new classes of electronics that match the mechanical properties of natural human tissue. This is accomplished with filled elastomer composites, soft microfluidics, and stretchable thin-film circuits with deterministic structures.
Soft Microfluidic Circuits & Sensors
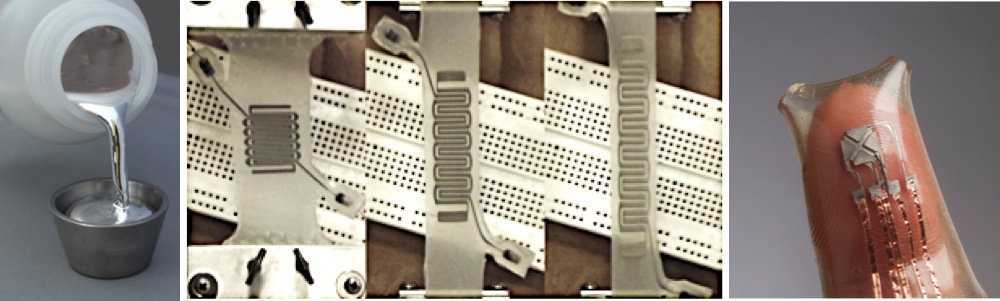
Soft microfluidic circuits and sensors are composed of silicone (polydimethylsiloxane) elastomers embedded with microchannels of liquid metal (LM). The LM is a gallium alloy eutectic that is nontoxic and oxidizes in air to form a leak-resistant skin. Because the Ga alloy is liquid at room temperature, it remains intact and conductive as the surrounding elastomer is deformed during stretching, compression, or shearing.
KB Ozutemiz, J Wissman, OB Ozdoganlar, C Majidi, “EGaIn–Metal Interfacing for Liquid Metal Circuitry and Microelectronics Integration,” Advanced Materials Interfaces 1701596 (2018). [link]
B. A. Gozen, A. Tabatabai, O. B. Ozdoganlar, C. Majidi, “High-Density Soft-Matter Electronics with Micron-Scale Line Width,” Advanced Materials 26 5211-5216 (2014). [link]
A. Fassler, C. Majidi, “3D Structures of Liquid-Phase GaIn Alloy Embedded in PDMS with Freeze Casting,” Lab on a Chip 13 4442-4450 (2013).
A. Tabatabai, A. Fassler, C. Usiak, C. Majidi, “Liquid-Phase Gallium-Indium Alloy Electronics with Microcontact Printing,” Langmuir 29 6194-6200 (2013).[link].
A. Fassler, C. Majidi, “Soft-matter capacitors and inductors for hyperelastic strain sensing and stretchable electronics,” Smart Materials and Structures 22 055023 (2013).[link].
P. Roberts, D. D. Damian, W. L. Shan, T Lu, C Majidi, “Soft-Matter Capacitive Sensor for Measuring Shear and Pressure Deformation,” IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany (2013).
Liquid Metal Switches & Actuators
The same LM alloys used for soft microfluidic circuits can also be used to create voltage-controlled switches and actuators. This is accomplished using electrochemistry and redox reactions to control the thickness of the gallium oxide skin on LM droplets. Changes in surface oxide lead to a change in the effective surface tension of the droplet, which can be harnessed to control droplet shape, coalescence, and separation.
J. Wissman, M. D. Dickey, C. Majidi, “Field-Controlled Electrical Switch with Liquid Metal,” Advanced Science 4 1700169 (2017). [link]
L. K. Russell, M. D. Dickey, C. Majidi, “Liquid Metal Actuator Driven by Electrochemical Manipulation of Surface Tension,” Applied Physics Letters 111 254101 (2017). [link]
Theoretical Modeling
Our modeling efforts have primarily focused on the collapse of channels in soft microfluidic systems. Theoretical predictions for the change in microfluidic geometry under far-field loading are derived using theories in elasticity, fracture mechanics, and contact mechanics. These models are validated with experimental testing and, when appropriate, finite element modeling.
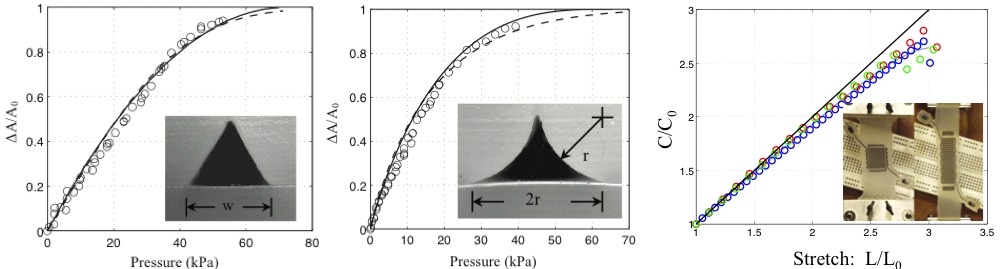
D. Tepayotl-Ramirez, Tong Lu, Y.-L. Park, C. Majidi, “Collapse of triangular channels in a soft elastomer,” Applied Physics Letters 102 044102 (2013).[link]
Y.-L. Park, D. Tepayotl-Ramirez, R. J. Wood, C. Majidi, “Influence of cross-sectional geometry on the sensitivity and hysteresis of liquid-phase electronic pressure sensors,” Applied Physics Letters 101 191904 (2012). [link]