Paper on Soft Robot Locomotion
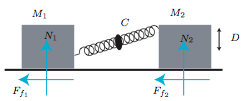
Together with Prof. Oliver O’Reilly and Xuance Zhou at UC Berkeley, we have developed a two degree-of-freedom model to examine the locomotion of soft robots on a rigid surface. Our dynamical analysis shows that locomotion featuring stick-slip friction is more efficient than a counterpart that only features slipping. This work was recently published in the journal of Nonlinear Dynamics (Springer). [publisher’s link] [pdf]